کد خبر:۱۲۹۴۵۰۳
دست رباتیک همهفنحریف؛ از بازکردن شیشه تا کار در فضای تنگ
دانشمندان دانشگاه ییل راهی برای حل این مشکل دیرینه پیدا کردهاند و به رباتها این امکان را میدهند که حرکات بسیار پیچیدهتری را با سهولت و کارایی بیشتری انجام دهند.

به گزارش گروه دانشگاه خبرگزاری دانشجو، رباتها میتوانند بارهای سنگین را بلند کنند و بدون توقف و خستگیناپذیر جعبهها را جابجا کنند یا قطعات را در خط مونتاژ مونتاژ کنند.
اما اگر از آنها بخواهید کاری ساده برای یک انسان انجام دهند، مانند چرخاندن دستگیره در، چرخاندن درب شیشه یا باز کردن لامپ، اغلب به طرز ناشیانهای اشتباه میکنند.
مانورهای دقیق، به خصوص هنگام کار در فضاهای تنگ یا غیرقابل پیشبینی. تاکنون، این محدودیت مانع بزرگی برای طراحی ماشینهایی بوده است که بتوانند به طور یکپارچه از کف کارخانه به محیطهای روزمره منتقل شوند.
دانشمندان دانشگاه ییل راهی برای حل این مشکل دیرینه پیدا کردهاند و به رباتها این امکان را میدهند که حرکات بسیار پیچیدهتری را با سهولت و کارایی بیشتری انجام دهند.
نوآوری آنها میتواند به پر کردن شکاف بین رباتهای صنعتی و ماشینهای چابک و سازگار مورد نیاز در خانهها، بیمارستانها و مناطق فاجعهزده کمک کند.
دسته کروی، حرکت را متحول میکند
معمولاً رباتها از یک گریپر (گیره) متصل به مچ دست استفاده میکنند که سه درجه آزادی دارد: غلتش (چرخش از جلو به عقب)، پیچش (چرخش از یک طرف به طرف دیگر) و انحراف (حرکت عمودی).
اما این مچها از نظر مکانیکی پیچیده هستند و اغلب دور از جسم مورد نظر قرار میگیرند و ربات را مجبور میکنند برای انجام تنظیمات، کل بازوی خود را حرکت دهد. نتیجه، حرکات ناشیانه و ناکارآمدی است که فضای بیشتری را نیز اشغال میکنند.
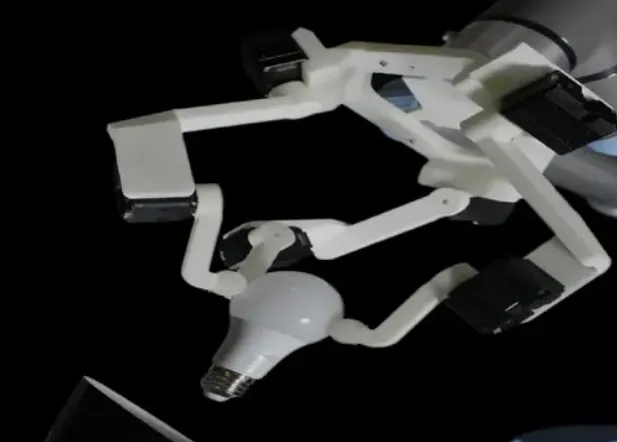
محققان دانشگاه ییل در آزمایشگاه پروفسور آرون دالر، یک دست رباتیک با نام مستعار ابوالهول (Sphinx) توسعه دادهاند که به این مشکل میپردازد.
مکانیزم کروی آن میتواند اشیاء را در امتداد هر سه محور بگیرد و بچرخاند و بخش زیادی از قابلیتهای یک مچ دست و چنگک سنتی را در یک طراحی واحد و ساده ترکیب کند.
واتسال پاتل، نویسندهی اصلی مقاله و کاندیدای دکترا در آزمایشگاه دالر، گفت: «این خیلی پیچیده نیست.»
«هیچ حسگر یا چیز دیگری روی آن نیست. بدون هیچ دوربین یا حسگر و چیزهایی از این قبیل کار میکند. اما به دلیل مکانیسم کروی، همیشه اشیاء را میغلتاند، بالا و پایین میپراند و منحرف میکند.»
«این روش خیلی کارآمدتر است و به فضای زیادی نیاز ندارید. مچ دست میتواند این چرخشها را خیلی نزدیکتر به جسم انجام دهد، بدون اینکه لازم باشد کل بازو را حرکت دهید. این روش خیلی سریعتر و خیلی کارآمدتر عمل میکند.»
طراحی جدید به طور قابل توجهی توانایی ربات را برای کار در فضاهای تنگ یا شلوغ بهبود میبخشد.
برای مثال، رباتها اکنون میتوانند کار ظریفی مانند پیچاندن لامپ در یک کمد تنگ را با سهولت بسیار زیادی انجام دهند.
گشودن قفل سازگاری واقعی با کار
فراتر از چنین سناریوهای خاصی، این پیشرفت، این حوزه را به یک آرزوی دیرینه برای ساخت رباتهایی که بتوانند به طور یکپارچه در محیطهای پیچیده و بدون ساختار، چه کمک در خانهها، چه مانور در مناطق فاجعهزده یا سازگاری با محیطهای غیرقابل پیشبینی دنیای واقعی، حرکت کنند و وظایف خود را انجام دهند، نزدیکتر میکند.
پاتل گفت: «در این محیطها، رباتها دقیقاً نمیدانند اشیاء کجا هستند.»
آنها در تلاشند تا با محیط و اشیاء سازگار شوند. رباتیک عموماً در همین مسیر حرکت میکند و ما نیز در تلاشیم تا همین مشکلات را حل کنیم.
یافتههای این مطالعه در مجله Nature Machine Intelligence منتشر شده است.
لینک کپی شد
گزارش خطا