کد خبر:۱۲۶۸۳۶۵
رباتی که با چرخهایش پرواز میکند! +فیلم
یک ربات پرنده به گونهای طراحی شده است که روی زمین با چرخهایش حرکت میکند و برای به پرواز درآمدن نیز همان چرخها را به صورت افقی درمیآورد و اوج میگیرد.
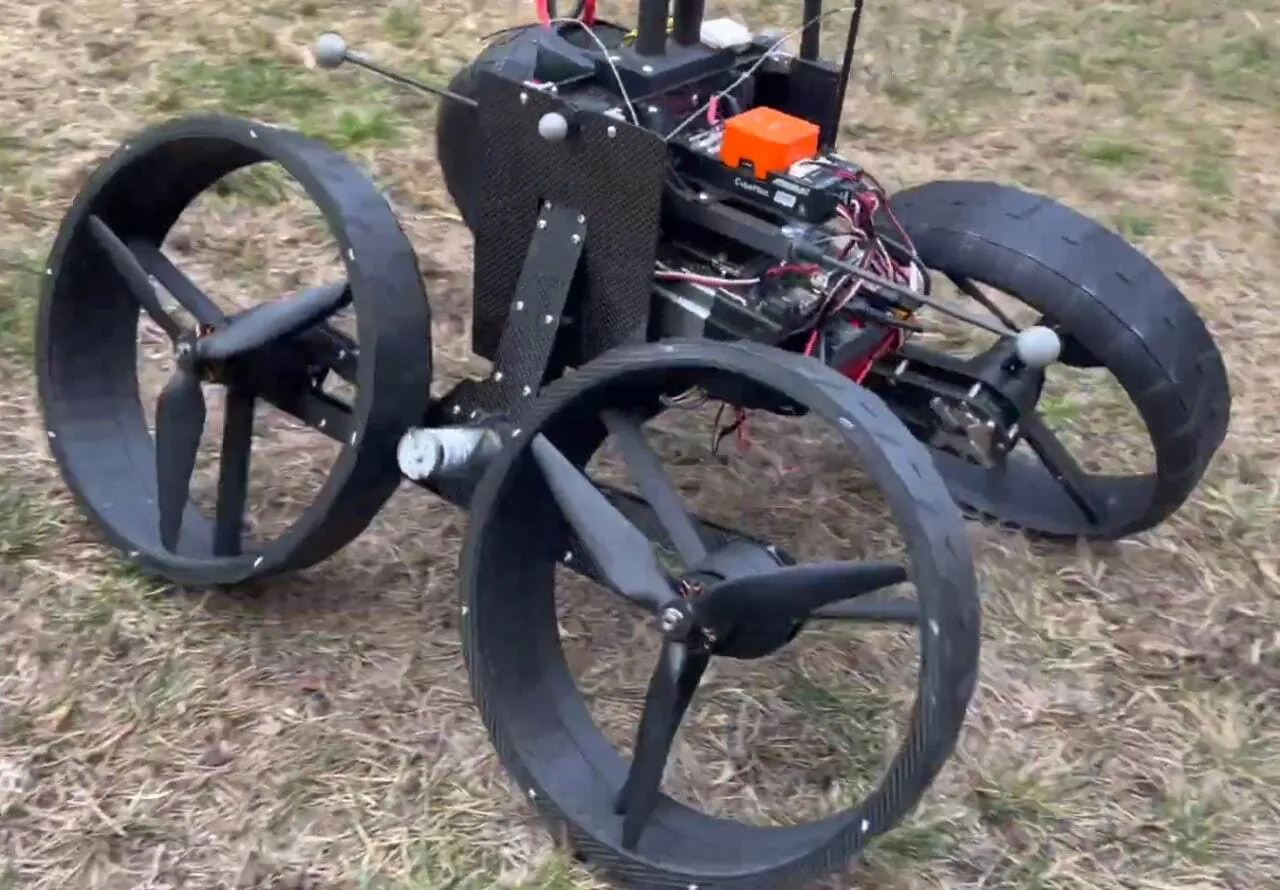

به گزارش گروه دانشگاه خبرگزاری دانشجو، رباتی با توانایی تغییر شکل بین پهپاد پرنده و کاوشگر چرخدار میتواند نقطه عطفی در توسعه فناوریهای رباتیک باشد. ربات جدیدی با نام ATMO که توسط تیمی از مهندسان مؤسسه فناوری کالیفرنیا (Caltech) طراحی شده، دقیقاً چنین قابلیتی دارد و بهگونهای توسعه یافته که بتواند هم در آسمان پرواز کند و هم روی زمین حرکت کند.
ترکیب قابلیت پرواز و حرکت زمینی در ربات ATMO
ربات ATMO بر پایه فناوری ربات پیشین این تیم با نام M4 ساخته شده است. آن ربات همانند یک پهپاد کوادکوپتر متعارف به پرواز درمیآمد و پس از فرود، ملخهای خود را جمع کرده و به چرخهایی برای حرکت روی زمین تبدیل میکرد. ملخهای آن به صورت افقی باز میشدند و پس از تماس با زمین به گونهای تا میشدند که با بدنه همتراز شده و امکان حرکت زمینی فراهم میشد.
چالشهای طراحی رباتهای چندمنظوره
هرچند این طراحی نوآورانه بود، اما محدودیتی مهم داشت: در صورت وجود موانعی مانند سنگ، چمن یا ناهمواریهای سطحی، امکان داشت ملخها بهطور کامل جمع نشوند و عملکرد ربات مختل شود. راهحل این مشکل استفاده از چرخهایی مستقل برای فرود است، ویژگیای که در ربات ATMO لحاظ شده است.
سازوکار پیشرفته تغییر شکل و کنترل هوشمند
ربات ATMO از یک موتور مرکزی برای جمع یا باز کردن چرخها بهره میبرد، درحالیکه هر یک از ملخها همچنان دارای موتور مستقل برای پرواز هستند. این ساختار امکان تغییر حالت سریع بین پرواز و حرکت زمینی را فراهم میکند. اما این فرایند بهسادگی ظاهر آن نیست.
تغییر زاویه پروانهها و تأثیر جریان هوا هنگام نزدیک شدن به زمین، خصوصیات پروازی ربات را دستخوش تغییر میکند. به همین دلیل، پژوهشگران الگوریتمی ویژه طراحی کردهاند که بهصورت لحظهای، نیروی رانش هر پروانه را تنظیم میکند تا پایداری پرواز و فرود حفظ شود.
فرودی پایدار و آغاز حرکت زمینی
این فناوری به ربات ATMO امکان میدهد در حالیکه چرخهایش از پیش در موقعیت پایین قرار دارند، فرودی پایدار و کنترلشده داشته باشد و بلافاصله پس از آن، روی سطح زمین به حرکت درآید. این قابلیت میتواند تحولی مهم در عملیات شناسایی، نجات و اکتشاف در محیطهای ناشناخته یا دشوار ایجاد کند.
کنترل دینامیکی در زمان تغییر شکل
یوآنیس ماندرلیز (Ioannis Mandralis)، نویسنده ارشد این پژوهش، در توضیح این دستاورد میگوید: «ما در اینجا یک سامانه پویا را معرفی کردهایم که پیشتر مورد بررسی قرار نگرفته بود. بهمحض آغاز فرایند تغییر شکل ربات، با جفتهای دینامیکی متفاوتی مواجه میشویم؛ یعنی نیروهایی متفاوت که برهمکنش دارند و سامانه کنترلی باید بتواند بهسرعت به همه آنها پاسخ دهد.»
نتایج این تحقیق و طراحی ربات ATMO، بهتازگی در مجله علمی معتبر Communications Engineering منتشر شده است. این دستاورد میتواند مسیر را برای ساخت نسل جدیدی از رباتهای پرنده-زمینی هموار کند که در محیطهای پیچیده و متغیر عملکردی بینقص دارند.
لینک کپی شد
گزارش خطا
۱
اخبار مرتبط