کد خبر:۸۹۵۴۷۳
محققان بررسی میکنند
روباتها و ترفندهای تغییرشکل / مهارت و انعطافپذیری روباتها افزایش پیدا میکند؟
همانطور که ترفند تغییرشکل برای بسیاری از موجودات ارزشمند است، محققان معتقدند که این امر میتواند برای روباتها نیز مهم و قابل استفاده باشد.
به گزارش خبرنگار فناوری خبرگزاری دانشجو؛ جان جی لی استادیار مهندسی مکانیک و علوم مواد دانشگاه ییل و همراه گروه تحقیقاتیش، روباتی ساختهاند که برای سازگاری با محیطهای مختلف شکل و نحوه حرکت خود را تغییر میدهد. درحالیکه روباتیستها قبلا تغییر شکل بسیار محدودی را در روباتها آزمایش کردهاند، این گروه تحقیقاتی به دنبال رویکردی گستردهتر هستند. مثلا آنها روباتی در نظر دارند که روی چهار بازو راه میرود و میتواند در مواقع نیاز به حالت کروی نیز تغییر شکل بدهد.
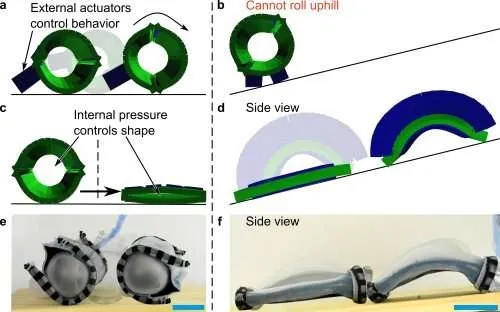
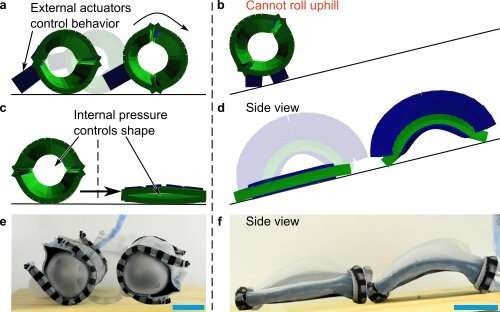
محققان با قراردادن روباتهایی که تغییر شکل میدهند در برابر روباتهایی که شکل خود را حفظ میکند دریافتند که روباتهایی که تغییر شکل میدهند برخلاف رقبای خود در محیطهای مختلف لبههای مجزایی دارند. آنها دریافتند که در هر نوع زمین مسطح یا کمی مایل، روباتهایی که میتوانند بادکنک داخلی خود را باد کرده تا به سمت هدف غلتیده شوند، بهترین عملکرد را داشتند. اما همین روباتها در سربالاییها مشکل بیشتری دارند و غالبا به عقب برمیگردند. در این زمینها روباتهایی که میتوانستند مانند پنکیک تخت شوند و حرکت کرمهای حلقوی را تقلید کنند، پیروز بودند.

این گروه تحقیقاتی پیش از ساخت روباتهای فیزیکی، از شبیهسازیهای کامپیوتری برای تحقیق درباره شکل و رفتار مناسب در هر محیط استفاده کردند و بهترین راهها برای تبدیل بین اشکال مختلف را برای روبات پیدا کردند. با این حال، ایجاد یک شبیهسازی برای روباتی ایدهآل که از نظر تئوری میتواند کارهای مختلفی را انجام دهد، یک مسئله است و ساخت دستگاه فیزیکی که بتواند همان کارها را در دنیای واقعی انجام دهد، مسئله دیگری است. پس از ساخت روباتهای فیزیکی، آنها در مقابل شبیهسازیهای کامپیوتری که براساس آنها ساخته شدهاند، قرار گرفتند تا با آنچه عملاً در دنیای واقعی امکانپذیر است، روبرو شوند.
دیلان شاه، دانشجوی دکترای دانشگاه ییل گفت:« طراحی نهایی روبات از ترکیب آنچه در شبیهسازی رایانهای مشاهده کردیم و آنچه در واقعیت دیده شد، بدست آمد. با این نرمافزار شما میتوانید روباتهای تغییرشکل دهندهای با دوازده قسمت حرکتی مجزا بسازید، اما در مطالعات قبلی ما در حرکت دادن این روباتهای ایدهآل به نحوی که با شبیهسازیها مطابقت داشته باشند، مشکل داشتیم.»
در انطباق شبیهسازیها با رباتهای فیزیکی، محققان غالباً طرحها را ساده کرده و سپس روشهای مختلفی را که رباتها میتوانند تغییر شکل دهند، کشف کردند. یک چیزی که آنها دریافتند این بود که حتی تغییرات نسبتاً کوچک در شکل میتواند با سازگاریهای رفتاری مرتبط باشد تا روبات بتواند در دو محیط متفاوت به حرکت درآید.
محققان در حال بررسی چگونگی استفاده از مواد هوشمند برای افزایش انعطافپذیری و مهارت رباتهای تغییر شکل دهنده هستند. در آینده رباتهای تغییر شکلدهنده میتوانند به عنوان ابزار علمی برای مطالعه رفتار دوزیستان، وسایل نقلیه تحویلی که نیاز به عبور از زمینهای مختلف دارند و ابزار بازرسی برای دسترسی به مکانهای صعبالعبور، مورد استفاده قرار گیرند.
لینک کپی شد
گزارش خطا
اخبار مرتبط