کد خبر:۱۳۱۹۰۰۹
رباتهای پیشرفته؛ توانایی حرکت و خزیدن در محیطهای سخت و ناهموار + فیلم
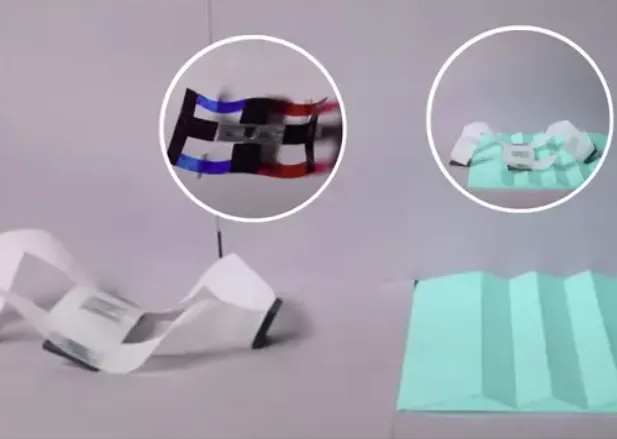
نوع جدیدی از رباتها که از ورقهای نازک مواد ساخته شدهاند، میتوانند طیف گستردهای از اقدامات را انجام دهند، علیرغم اینکه هیچ موتوری ندارند. این دسته جدید از رباتها که از یک ماده مسطح ساخته شدهاند، میتوانند به صدها شکل پایدار تبدیل شوند.

به گزارش گروه دانشگاه خبرگزاری دانشجو، نوع جدیدی از رباتها که از ورقهای نازک مواد ساخته شدهاند، میتوانند طیف گستردهای از اقدامات را انجام دهند، علیرغم اینکه هیچ موتوری ندارند. این دسته جدید از رباتها که از یک ماده مسطح ساخته شدهاند، میتوانند به صدها شکل پایدار تبدیل شوند.
این "متابوتها" که توسط تیمی به رهبری محققان دانشگاه ایالتی کارولینای شمالی ساخته شدهاند، اساساً شبیه ورقهای پلاستیکی متحرک هستند که قادر به حرکت در اطراف یک سطح یا گرفتن اشیاء هستند.
یین، نویسنده مسئول مقالهای در مورد این کار و استاد مهندسی مکانیک و هوافضا در دانشگاه ایالتی کارولینای شمالی، گفت: ما با ورقهای پلیمری سادهای که سوراخهایی در آنها وجود دارد شروع میکنیم، اما با اعمال لایههای نازک روی سطح پلیمر، میتوانیم موادی را که به الکتریسیته یا میدانهای مغناطیسی پاسخ میدهند، در آن بگنجانیم. این لایهها به عنوان محرک عمل میکنند و به ما امکان میدهند شکل ورق را از راه دور تغییر دهیم.
رباتها حالتهای حرکتی متعددی ارائه میدهند
این رباتهای مسطح حالتهای حرکتی متعددی دارند و قادر به پریدن یا خزیدن با سرعتهای مختلف هستند.
کایژی ژو، نویسنده اول مقاله و دانشجوی دکترا در دانشگاه ایالتی کارولینای شمالی، تأکید کرد که با اتصال چندین ورق، ساختارهایی ایجاد میکنیم که در ابتدا صاف قرار میگیرند، اما سپس میتوانند خم شوند و خود را در طیف گستردهای از پیکربندیهای پایدار تا کنند.
ژو افزود: به عنوان مثال، اگر چهار ورق را به هم وصل کنیم، یک متابوت خواهید داشت که میتواند به اندازه یک ورق کاغذ صاف باشد، اما در ۲۵۶ حالت پایدار مختلف تا میشود.
رباتها میتوانند شکل و نحوه راه رفتن خود را تغییر دهند
تیم تحقیقاتی همچنین نشان داد که این رباتها میتوانند شکل و نحوهی راه رفتن خود را برای سازگاری با زمینهای مختلف یا انجام عملکردهای متنوع، مانند گرفتن و بلند کردن اشیاء، تغییر دهند.
ژو افزود: «و هنگامی که مواد پیزوالکتریک را در لایههای نازک قرار میدهیم، میتوانیم با تغییر ولتاژ و هرتز، ارتعاشات کنترلشدهای را در متاباتها ایجاد کنیم و کنترل بیشتری بر حرکت آنها داشته باشیم. به عنوان مثال، میتوانیم یک متابات را طوری تنظیم کنیم که در حالی که در یک مکان ثابت است، به چپ یا راست بچرخد.
فراساختارهای پوسته نازک چندپایدار مبتنی بر سطح قابل توسعه
کار محققان که در مجله Science Advances منتشر شده است، متاساختارهای پوسته نازک چندپایدار مبتنی بر سطح قابل توسعه با قابلیت پیکربندی مجدد بالا برای دستکاری و حرکت تطبیقی را مهار میکند. این متاساختارهای چندپایدار با برش و اتصال ورقهای پلیمری نازک با برشهای الگودار ساخته میشوند و امکان ذخیره انرژی الاستیک قابل برنامهریزی را فراهم میکنند.
یک واحد واحد تا ۲۰ پیکربندی پایدار را به دست میآورد، در حالی که یک مجموعه چهار واحدی ۲۵۶ حالت پیکربندی مجدد را از طریق تا کردن ساده چینهای مجازی پویا به دست میدهد. محققان در این مطالعه گفتند: «هنگامی که این متاساختارها با محرکهای نرم چندپاسخه مبتنی بر ورق نازک ادغام میشوند، به متابوتهای بسیار سازگار تبدیل میشوند، از جمله گیرههای نرم دوپایدار جهانی و غیرتهاجمی؛ جهندههای چندگام مغناطیسی؛ و خزندههای دوپاسخه که با تحریک مغناطیسی و الکتریکی کار میکنند.»
محققان همچنین تأکید کردند که این سیستمها سازگاری و مانورپذیری بالایی را نشان میدهند و قادر به پیمایش در زمینهای پیچیده و محیطهای محدود از طریق تبدیل شکلهای مورد نیاز هستند و راه را برای پلتفرمهای رباتیک نرم با انرژی کارآمد و قابل پیکربندی مجدد هموار میکنند.
یین گفت: «این کار در مراحل اولیه و اثبات مفهوم است، اما نشان میدهد که این رویکرد به رباتیک هم ارزان و هم بسیار سازگار است. هدف ما ایجاد پلی بین متامواد و رباتیک بود و فکر میکنیم نتایج امیدوارکننده هستند.»
لینک کپی شد
گزارش خطا
اخبار مرتبط