کد خبر:۱۲۸۴۱۴۱
اتمام کار یکهفتهای در چند ساعت در استودیوی بینایی رباتیک کانادایی
یک شرکت کانادایی استودیوی طراحی مبتنی بر وب و آموزش هوش مصنوعی خود را توسعه داده است که پروژههای رباتیک هدایتشده با دید چهاربعدی را ساده میکند.
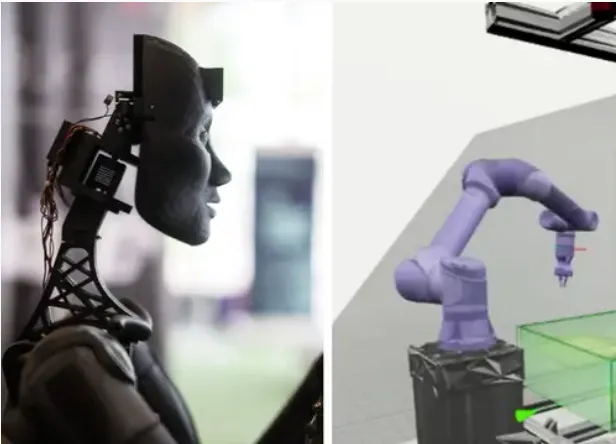
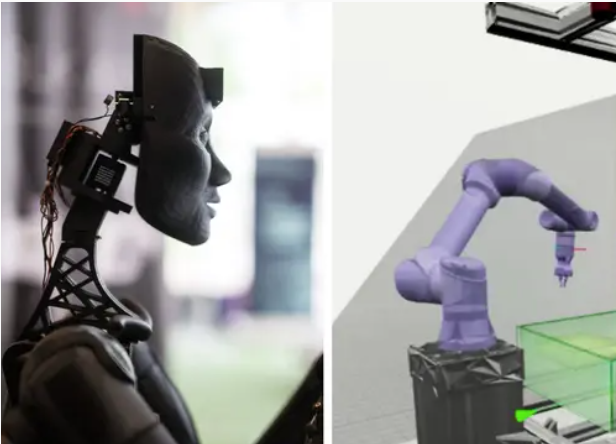
به گزارش گروه دانشگاه خبرگزاری دانشجو، یک شرکت کانادایی استودیوی طراحی مبتنی بر وب و آموزش هوش مصنوعی خود را توسعه داده است که پروژههای رباتیک هدایتشده با دید چهاربعدی را ساده میکند. این سیستم که Apera Forge نام دارد، بدون هیچ سختافزاری، یک استودیوی طراحی بینایی هوش مصنوعی مبتنی بر مرورگر است.
جدیدترین ویژگیهای این سیستم از طراحی پیشرفته سلولهای رباتیک، پیکربندی دوربینهای نصبشده در انتهای بازو (EOAT) و شبیهسازی و آموزش کامل برای کاربردهای خارج کردن از قفسه پشتیبانی میکند.
این استودیوی طراحی میتواند پروژههای اتوماسیون رباتیک هدایتشده با دید چهاربعدی را ساده کند.
این سیستم زمان و خطرات مربوط به توسعه سلولهای رباتیک هدایتشده با بینایی را کاهش میدهد.
این سیستم که توسط شرکت آپرا توسعه داده شده است - و از هوش مصنوعی بهره میبرد - زمان و خطرات مربوط به توسعه سلولهای رباتیک هدایتشده توسط بینایی را برای جمعآوری سطلهای زباله، جابجایی مواد و اکنون خارج کردن آنها از قفسهها کاهش میدهد.
آپرا خاطرنشان کرد که با کمک سیستم پیشرفته آنها، تولیدکنندگان صنعتی میتوانند کاری را که زمانی هفتهها یا حتی ماهها طول میکشید، در عرض چند ساعت انجام دهند و زمان پیادهسازی را به طور قابل توجهی کاهش دهند و در عین حال موفقیت پروژههای اتوماسیون رباتیک هدایتشده توسط بینایی (VGR) را تضمین کنند.
کاربران میتوانند با شبیهسازی کاربرد خود، شامل قطعات، گیره، ربات و محیط سلول، شروع کنند - این کار چند دقیقه طول میکشد، نه چند روز. سپس Forge یک شبکه عصبی هوش مصنوعی را از طریق یک میلیون چرخه دیجیتال آموزش میدهد تا به قابلیت اطمینان بیش از ۹۹.۹٪ در تشخیص اشیاء و انجام وظایف دست یابد - طبق گفته آپرا، یک برنامه بینایی کامل را ظرف ۲۴ تا ۴۸ ساعت ارائه میدهد که آماده استقرار در محل است.
آپرا فورج به ساخت و اعتبارسنجی سلولهای جمعآوری و خارج کردن سطل زباله کاربران کمک میکند و برنامه بینایی هوش مصنوعی شما را در یک محیط شبیهسازی آموزش میدهد - که نیاز به سرمایهگذاری اولیه روی سختافزار را از بین میبرد و در عین حال به شما اطمینان میدهد که سلول رباتیک کاربران مطابق با مشخصات تعیینشده عمل خواهد کرد.
با آخرین بهروزرسانی، فورج اکنون از طراحی پیشرفته سلول با انعطافپذیری بیشتر - تنظیم محل قرارگیری دوربین، موقعیت سطل زباله و موانع متعدد - پشتیبانی میکند تا با طرحبندیهای دنیای واقعی شما بهتر مطابقت داشته باشد و نتایج شبیهسازی را بهبود بخشد.
Forge اکنون از شبیهسازی کامل پشتیبانی میکند
آپرا در بیانیهای گفت: «Forge اکنون از شبیهسازی کامل و آموزش مبتنی بر هوش مصنوعی برای کاربردهای خارج کردن قطعات از قفسه پشتیبانی میکند. به سادگی طرحبندیهای ساختاریافته قطعات را تعریف کنید، انتخابها را شبیهسازی کنید و مدلهای بینایی را برای استقرار سریعتر آموزش دهید، و آموزش و اعتبارسنجی کامل را در داخل Forge انجام دهید.»
این قابلیت برای قطعات قفسهبندی شده طراحی شده است - جایی که فاصلهگذاری، جهتگیری و ساختار قفسهبندی ثابت برای تشخیص و انتخاب مؤثر قطعه بسیار مهم است. طبق یک بیانیه مطبوعاتی، مدلهای بینایی قوی هوش مصنوعی را مستقیماً در Forge و بدون تماس با مهندسان Apera آموزش دهید - که صرفهجویی زیادی در زمان برای یکپارچهسازان و تولیدکنندگان صنعتی ایجاد میکند.
این شرکت فاش کرد که علاوه بر پیکربندیهای نصب ثابت (چشم به دست)، Apera Forge اکنون از پیکربندیهای دید EOAT Mount (چشم در دست) نیز پشتیبانی میکند. کاربران اکنون ابزارهایی برای طراحی و اعتبارسنجی تنظیماتی دارند که در آنها دوربینها مستقیماً روی ابزار انتهای بازوی ربات (EOAT) نصب میشوند.
این سیستم میتواند با پیشنمایش نمای دوربین، به صورت بصری محل ایدهآل قرارگیری دوربین را روی ابزار انتهای بازو تعیین کند و دید واضح و بدون مانعی از قطعات را تضمین کند.
این سیستم همچنین از موانع خلبان خودکار یکپارچه برای بهبود ناوبری ربات و جلوگیری از برخورد در شبیهسازیها پشتیبانی میکند. کاربران اکنون میتوانند تنظیمات کامل سلول Vue خود، شامل سطلها، مناطق جستوجو، موانع، جداول و دوربینهای کالیبره شده را وارد کنند.
لینک کپی شد
گزارش خطا
اخبار مرتبط