کد خبر:۱۲۹۴۴۹۹
خودسازماندهی رباتهای کوچک با زبان صدا
یک تیم بینالمللی از دانشمندان با الهام از طبیعت، رباتهای میکرومقیاسی را مدلسازی کردهاند که از امواج صوتی برای هماهنگی در دستههای بزرگی که رفتاری هوشمند از خود نشان میدهند، استفاده میکنند.
به گزارش گروه دانشگاه خبرگزاری دانشجو، حیواناتی مانند خفاشها، نهنگها و حشرات مدتهاست که از سیگنالهای صوتی برای ارتباط و ناوبری استفاده میکنند. اکنون، یک تیم بینالمللی از دانشمندان با الهام از طبیعت، رباتهای میکرومقیاسی را مدلسازی کردهاند که از امواج صوتی برای هماهنگی در دستههای بزرگی که رفتاری هوشمند از خود نشان میدهند، استفاده میکنند.
به گفتهی ایگور آرونسون، سرپرست تیم و استاد ارشد مهندسی زیستپزشکی، شیمی و ریاضیات در دانشگاه ایالتی پنسیلوانیا، این گروههای رباتیک میتوانند روزی وظایف پیچیدهای مانند کاوش در مناطق فاجعهزده، پاکسازی آلودگی یا انجام درمانهای پزشکی از داخل بدن را انجام دهند.
آرونسون گفت: «دستههایی از زنبورها یا مگسهای ریز را تصور کنید. آنها حرکت میکنند، این حرکت صدا ایجاد میکند و این صدا آنها را منسجم نگه میدارد، در حالی که بسیاری از آنها به عنوان یک واحد عمل میکنند.»
محققان کار خود را در مجله Physical Review X منتشر کردهاند.
از آنجایی که این دستههای مینیاتوری و پخشکننده صدا از میکروماشینها، خودسازمانده هستند، میتوانند در فضاهای تنگ حرکت کنند و حتی در صورت تغییر شکل، خود را دوباره شکل دهند. آرونسون توضیح داد که هوش جمعی یا نوظهور این دستهها میتواند روزی برای انجام وظایفی مانند پاکسازی آلودگی در محیطهای آلوده مورد استفاده قرار گیرد.
فراتر از محیط، دستههای رباتها میتوانند به طور بالقوه در داخل بدن کار کنند و به عنوان مثال، داروها را مستقیماً به ناحیه مشکلدار برسانند. حسگری جمعی آنها همچنین به تشخیص تغییرات در محیط اطراف کمک میکند و توانایی آنها در "خودترمیمی" به این معنی است که آنها میتوانند حتی پس از تجزیه شدن، به عنوان یک واحد جمعی به عملکرد خود ادامه دهند، که میتواند به ویژه برای تشخیص تهدید و کاربردهای حسگر مفید باشد. آرونسون گفت.
او گفت: «این نشان دهنده یک جهش قابل توجه به سمت ایجاد میکرورباتهای هوشمندتر، مقاومتر و در نهایت مفیدتر با حداقل پیچیدگی است که میتوانند برخی از سختترین مشکلات جهان ما را برطرف کنند.» «بینشهای حاصل از این تحقیق برای طراحی نسل بعدی میکرورباتها که قادر به انجام وظایف پیچیده و پاسخ به نشانههای خارجی در محیطهای چالشبرانگیز هستند، بسیار مهم است.»
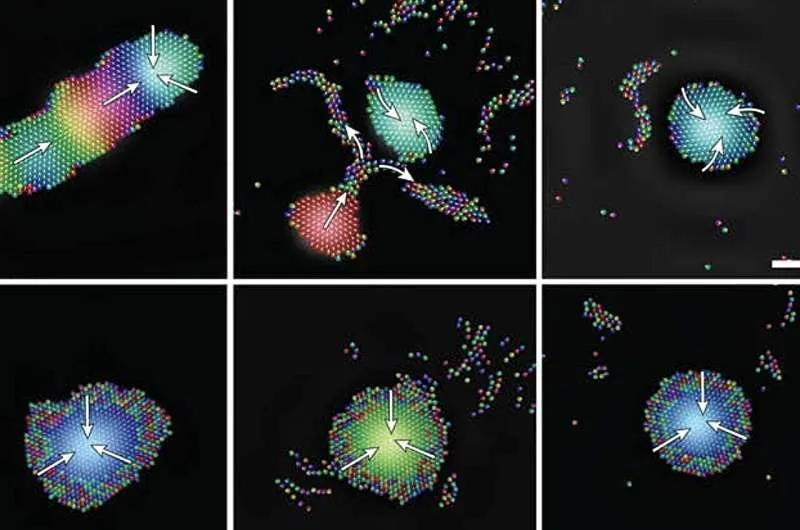
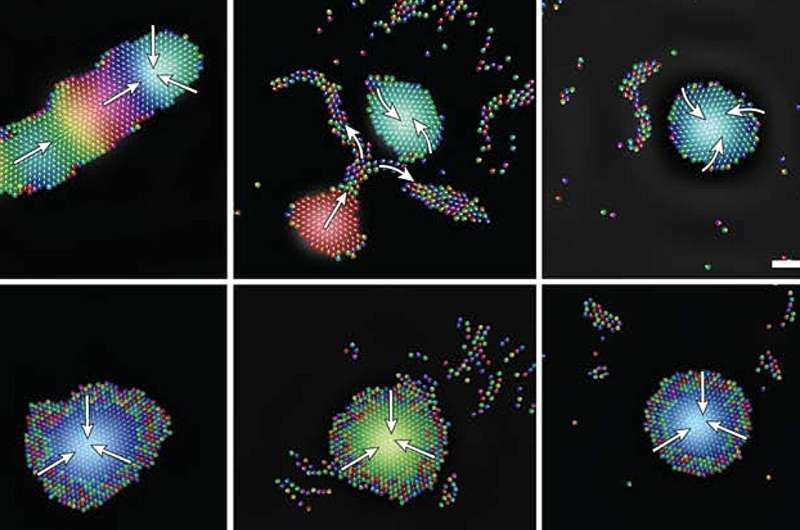
برای این مطالعه، تیم یک مدل کامپیوتری برای ردیابی حرکات رباتهای کوچک، که هر کدام مجهز به یک ساطعکننده صوتی و یک آشکارساز بودند، توسعه داد. آنها دریافتند که ارتباط صوتی به عوامل رباتیک منفرد اجازه میدهد تا به طور یکپارچه با هم کار کنند و شکل و رفتار خود را با محیطشان تطبیق دهند، دقیقاً مانند یک دسته ماهی یا یک دسته پرنده.
آرونسون گفت، در حالی که رباتهای مورد بحث در این مقاله، به جای دستگاههای فیزیکی ساخته شده، عوامل محاسباتی در یک مدل نظری یا مبتنی بر عامل بودند، شبیهسازیها ظهور هوش جمعی را مشاهده کردند که احتمالاً در هر مطالعه تجربی با همان طراحی ظاهر میشود.
آرونسون گفت: «ما هرگز انتظار نداشتیم مدلهای ما چنین سطح بالایی از انسجام و هوش را از چنین رباتهای سادهای نشان دهند. اینها مدارهای الکترونیکی بسیار سادهای هستند. هر ربات میتواند در جهتی حرکت کند، دارای یک موتور، یک میکروفون کوچک، یک بلندگو و یک نوسانساز است. همین، اما با این وجود قادر به هوش جمعی است. نوسانساز خود را با فرکانس میدان صوتی گروه هماهنگ میکند و به سمت قویترین سیگنال مهاجرت میکند.»
این کشف نقطه عطف جدیدی برای یک حوزه نوپا به نام ماده فعال است، مطالعه رفتار جمعی عوامل بیولوژیکی و مصنوعی میکروسکوپی خودران، از دستههای باکتری یا سلولهای زنده گرفته تا میکرورباتها. آرونسون توضیح داد که این برای اولین بار نشان میدهد که امواج صوتی میتوانند به عنوان وسیلهای برای کنترل رباتهای میکرو اندازه عمل کنند. تاکنون، ذرات ماده فعال عمدتاً از طریق سیگنالدهی شیمیایی کنترل میشدند.
آرونسون گفت: «امواج صوتی برای ارتباط بسیار بهتر از سیگنالدهی شیمیایی عمل میکنند. امواج صوتی سریعتر و تقریباً بدون اتلاف انرژی منتشر میشوند - و طراحی بسیار سادهتر است. رباتها به طور مؤثر یکدیگر را «میشنوند» و «پیدا میکنند» که منجر به خودسازماندهی جمعی میشود. هر عنصر بسیار ساده است. هوش و عملکرد جمعی از حداقل مواد تشکیلدهنده و ارتباط صوتی ساده ناشی میشود.»
دیگر نویسندگان این مقاله الکساندر زیپکه، ایوان ماریشف و اروین فری از دانشگاه لودویگ ماکسیمیلیان مونیخ هستند.
لینک کپی شد
گزارش خطا