کد خبر:۱۲۵۹۹۷۸
ساخت رباتهای گروهی بدون نیاز به حسگر یا کد دستوری
محققان رباتهای گروهی نسل بعدی میسازند که بدون کد یا حسگر حرکت میکنند و با هم همکاری میکنند.
به گزارش گروه دانشگاه خبرگزاری دانشجو، آنها ساده به نظر میرسند. آنها مانند یک تیم حرکت میکنند؛ و به سنسور، کد یا دستوری نیاز ندارند. با رباتهای گروهی نسل بعدی که برای تقلید از طبیعت ساخته شدهاند، آشنا شوید.
دانشمندان دانشگاه هاروارد و دانشگاه ملی سئول در حرکتی جسورانه از انبوه رباتهای مجهز به حسگر و مبتنی بر هوش مصنوعی، از نوعی ربات کاملاً ساده رونمایی کردهاند - رباتی که برای عمل هماهنگ، از اصول طبیعت پیروی میکند، نه کد.
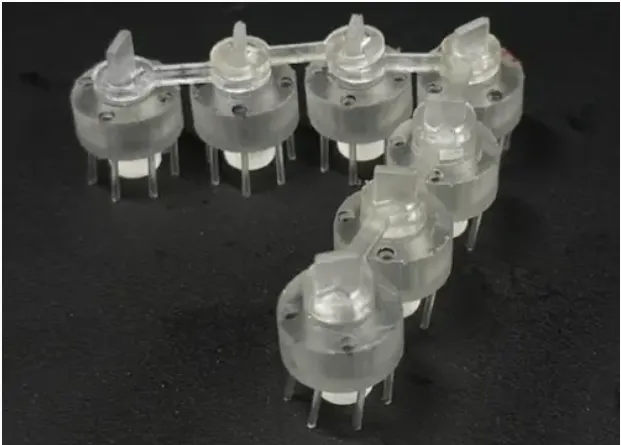
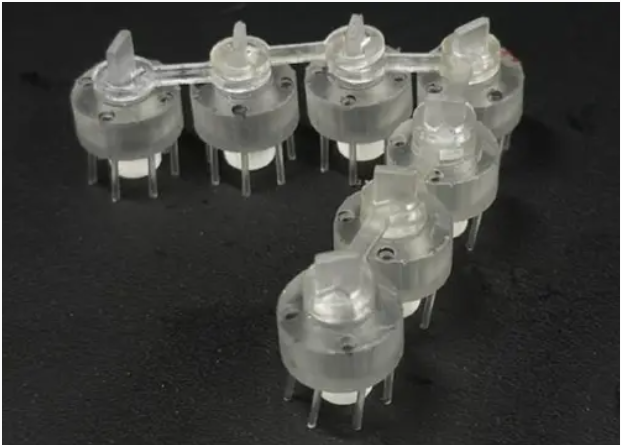
در قلب اختراع آنها یک ایده به طرز فریبندهای ساده وجود دارد. در این تحقیق مشترک، ذرات کوچک و خودمتحرک به یکدیگر متصل شده و ساختارهای انعطافپذیر و زنجیرهای شکل ایجاد میکنند و بقیه کار را به فیزیک واگذار میکنند.
این به اصطلاح «رباتهای لینک» نیازی به هوش مصنوعی، سیستمهای کنترل پیچیده یا حتی حسگر ندارند. با این حال، آنها میتوانند وظایف شگفتانگیز پیچیدهای را انجام دهند - حرکت، سازگاری، کاوش و حتی همکاری به عنوان یک گروه.
طراحی رباتیک با الهام از طبیعت
این یک تضاد قابل توجه با رباتیک گروهی سنتی است که معمولاً به مجموعهای از ابزارهای پیشرفته متکی است.
از پهپادها گرفته تا رباتهای مینیاتوری، این ماشینها برای هماهنگی به حسگرهای پیشرفته، ارتباط بیسیم و الگوریتمهای دقیق نیاز دارند.
اگرچه چنین سیستمهایی در محیطهای کنترلشده مؤثر هستند، اما اغلب وقتی صحبت از مقرونبهصرفه بودن، سازگاری یا ناهمواری در زمینهای دنیای واقعی میشود، با مشکل مواجه میشوند.
از سوی دیگر، طبیعت در سادگی شکوفا میشود.
کلونیهای مورچهها و گروههای سلولی با استفاده از واحدهای پایه و بدون فرماندهی مرکزی، هماهنگی قابل توجهی را به دست میآورند و رفتارهای پیچیده را از طریق تعاملات محلی و قوانین فیزیکی اجرا میکنند.
با مهار این منطق زیبا، محققان رباتها را در زنجیرههای V شکل چیدند، جایی که حرکت صرفاً توسط محدودیتهای مکانیکی دیکته میشد. نتیجه قابل توجه بود: رفتاری هماهنگ و واقعی از پایه پدیدار شد - بدون کنترل مرکزی، بدون الگوریتم، بدون مغز دیجیتال.
هر ربات لینک از قوانین فیزیکی سادهای پیروی میکند که نحوه حرکت یا چرخش آن را در زنجیره تعیین میکند. با تغییر هندسه این لینکها، کل سیستم میتواند تغییر شکل داده و جهت خود را تغییر دهد و به طور یکپارچه با وظایف یا محیطهای مختلف سازگار شود.
این تیم نشان داد که این رباتها تنها با تغییر پیکربندی پیوندهایشان میتوانند طیف گستردهای از اقدامات را انجام دهند - حرکت به جلو، توقف، چرخش یا حتی تغییر جهت. آنها فقط متحرک نیستند؛ بلکه به طرز چشمگیری چابک هستند.
رباتهای جوهری l میتوانند از شکافهای باریک عبور کنند، موانع فیزیکی برای مسدود کردن ورودیها ایجاد کنند و حتی اشیاء را احاطه کرده و حمل کنند. وقتی به صورت گروهی مستقر میشوند، نوعی کار تیمی مکانیکی از خود نشان میدهند و وظایفی را انجام میدهند که انجام آنها به تنهایی برای یک ربات غیرممکن است.
کارهای پیچیده را به راحتی انجام میدهد
برای درک این رفتارها و تنظیم دقیق طرحهایشان، محققان یک مدل محاسباتی دقیق ساختند. این شبیهسازی به آنها اجازه داد تا بررسی کنند که چگونه ساختارهای زنجیرهای مختلف، هندسه پیوندها و تعداد ذرات بر حرکت و هماهنگی تأثیر میگذارند.
با اجرای آزمایشهای مجازی بیشماری، آنها توانستند به طور سیستماتیک سازوکارهای زیربنایی این رفتارهای نوظهور را رمزگشایی کنند.
یافتههای آنها نشان داد که رباتها میتوانند بدون هیچ حسگر یا دستورالعمل از پیش برنامهریزیشدهای، توالی وظایف پیچیدهای مانند جستوجو در زمینهای شلوغ، جابجایی اشیاء و همکاری را انجام دهند.
این رویکرد مینیمالیستی، دریچهای به سوی نسل جدیدی از سیستمهای رباتیک کمهزینه و کممصرف میگشاید که میتوانند در محیطهای آشفته و غیرقابلپیشبینی رشد کنند.
این مطالعه توسط پروفسور هو-یانگ کیم، دکتر کیونگمین سون و دانشجوی کارشناسی ارشد کوانوو کیم از دانشکده مهندسی مکانیک دانشگاه ملی سئول، به همراه پروفسور ال. ماهادوان و دکتر کیمبرلی بوال در هاروارد رهبری شد.
لینک کپی شد
گزارش خطا
اخبار مرتبط