کد خبر:۱۲۲۲۵۷۸
مهندسان MIT به سیستمهای چند رباتی کمک میکنند تا در منطقه ایمنی بمانند
مهندسان MIT روش آموزشی جدیدی را توسعه دادهاند که عملکرد ایمن این سیستمها را در محیطهای شلوغ تضمین میکند.
به گزارش گروه دانشگاه خبرگزاری دانشجو، نمایشهای هواپیماهای بدون سرنشین شکل فزایندهای محبوب از نمایش نور در مقیاس بزرگ هستند. این نمایشها شامل صدها تا هزاران ربات هوابرد است که هر کدام برای پرواز در مسیرهایی برنامه ریزی شدهاند که با هم شکلها و الگوهای پیچیدهای را در سراسر آسمان تشکیل میدهند. هنگامی که آنها طبق برنامه پیش میروند، نمایش هواپیماهای بدون سرنشین میتواند تماشایی باشد. اما هنگامی که یک یا چند هواپیمای بدون سرنشین دچار نقص عملکرد شوند، همانطور که اخیراً در فلوریدا، نیویورک و جاهای دیگر اتفاق افتاده است، میتوانند خطری جدی برای تماشاگران در زمین باشند.
تصادفات نمایش هواپیماهای بدون سرنشین چالشهای حفظ ایمنی را در آنچه مهندسان «سیستمهای چند عاملی» مینامند برجسته میکنند - سیستمهای چند عامل هماهنگ، مشارکتی و برنامهریزیشده با رایانه، مانند رباتها، پهپادها، و خودروهای خودران.
در حال حاضر، تیمی از مهندسان MIT یک روش آموزشی برای سیستمهای چند عاملی ایجاد کردهاند که میتواند عملکرد ایمن آنها را در محیطهای شلوغ تضمین کند. محققان دریافتند هنگامی که این روش برای آموزش تعداد کمی از عوامل استفاده میشود، حاشیههای ایمنی و کنترلهای آموختهشده توسط آن عوامل میتواند بهطور خودکار به تعداد بیشتری از عوامل مقیاس شود، به گونهای که ایمنی سیستم را به عنوان یک کل تضمین کند.
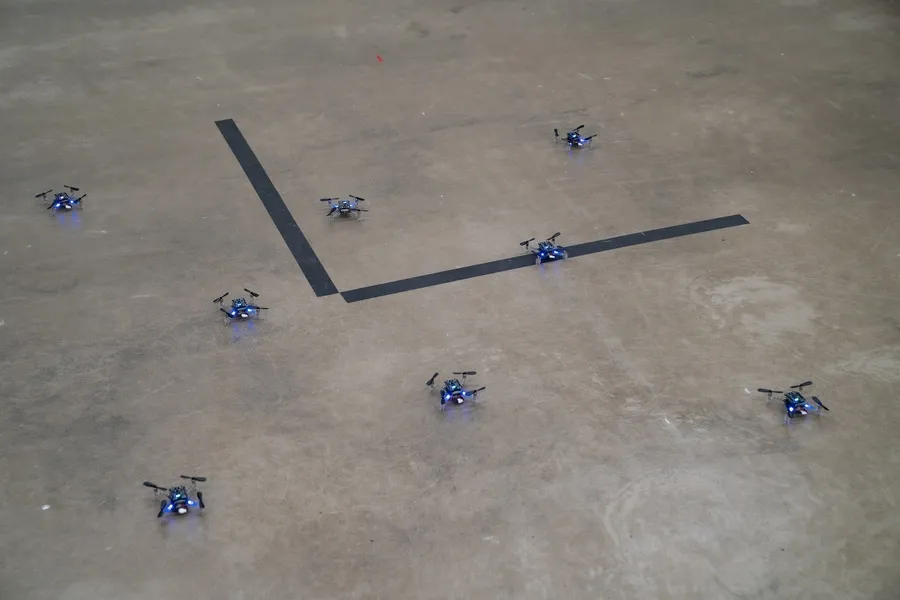
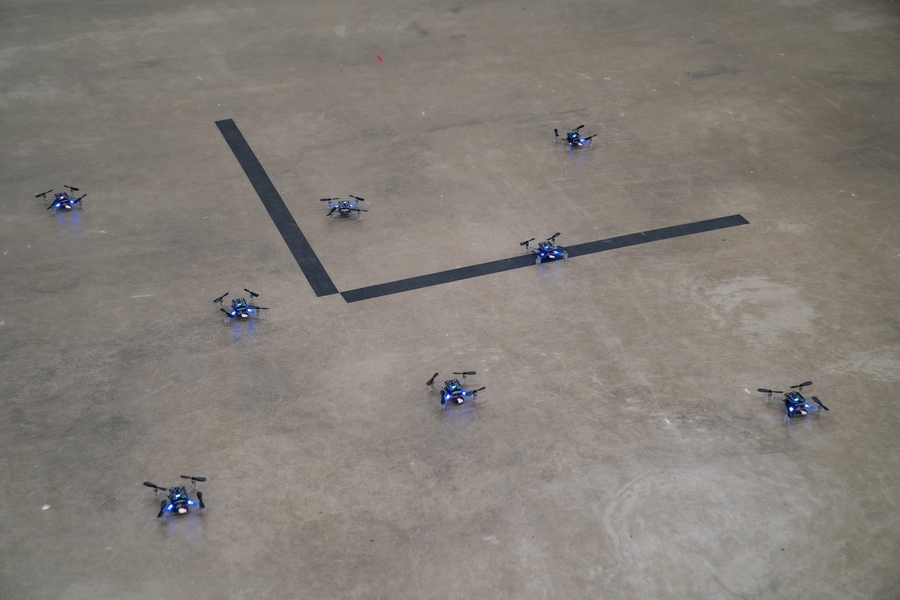
در نمایشهای دنیای واقعی، این تیم تعداد کمی پهپاد به اندازه کف دست را برای انجام ایمن اهداف مختلف، از تعویض همزمان موقعیت در میانه پرواز تا فرود بر روی وسایل نقلیه متحرک تعیینشده روی زمین، آموزش دادند. در شبیهسازیها، محققان نشان دادند که برنامههای مشابهی که بر روی چند پهپاد آموزش داده میشوند، میتوانند تا هزاران پهپاد کپی و مقیاس شوند و سیستم بزرگی از عوامل را قادر میسازد تا به طور ایمن همان وظایف را انجام دهند.
چوچو فان، استادیار هوانوردی و فضانوردی در MIT میگوید: این میتواند استانداردی برای هر برنامهای باشد که به تیمی از عوامل نیاز دارد، مانند رباتهای انبار، پهپادهای جستوجو و نجات، و خودروهای خودران. این یک سپر یا فیلتر ایمنی فراهم میکند و میگوید هر مامور میتواند به ماموریت خود ادامه دهد و ما به شما میگوییم که چگونه ایمن باشید.
فن و همکارانش در مطالعهای که این ماه در مجله IEEE Transactions on Robotics منتشر شد، روش جدید خود را گزارش کردند. نویسندگان مشترک این مطالعه، دانشجویان فارغ التحصیل MIT Songyuan Zhang و Oswin So و همچنین فوق دکترای سابق MIT Kunal Garg هستند که اکنون استادیار دانشگاه ایالتی آریزونا است.
حاشیههای بازار
هنگامی که مهندسان برای ایمنی در هر سیستم چند عاملی طراحی میکنند، معمولاً باید مسیرهای بالقوه هر عامل را با توجه به هر عامل دیگری در سیستم در نظر بگیرند. این برنامه ریزی مسیر زوجی یک فرآیند زمان بر و محاسباتی پرهزینه است؛ و حتی پس از آن، ایمنی تضمین نمیشود.
ژانگ، نویسنده اصلی این مطالعه میگوید: در نمایش هواپیماهای بدون سرنشین، به هر پهپاد یک مسیر مشخص داده میشود - مجموعهای از ایستگاههای بین راه و مجموعهای از زمانها - و سپس آنها اساساً چشمان خود را میبندند و برنامه را دنبال میکنند. از آنجایی که آنها فقط میدانند کجا و در چه زمانی باید باشند، اگر اتفاقات غیرمنتظرهای رخ دهد، نمیدانند چگونه خود را وفق دهند.
تیم MIT در عوض به دنبال توسعه روشی برای آموزش تعداد کمی از ماموران برای مانور ایمن بود، به گونهای که بتواند به طور کارآمدی برای هر تعداد عامل در سیستم مقیاس کند؛ و به جای برنامهریزی مسیرهای خاص برای عوامل فردی، این روش به عوامل امکان میدهد تا به طور مداوم حاشیههای ایمنی یا مرزهایی را که فراتر از آن ممکن است ناامن باشند، ترسیم کنند. سپس یک نماینده میتواند هر تعداد مسیر را برای انجام وظیفه خود طی کند، به شرطی که در حاشیه ایمنی خود باقی بماند.
به نوعی، این تیم میگوید که این روش شبیه به نحوه حرکت شهودی انسان در محیط اطراف است؛ بنابراین توضیح میدهد: بگویید که در یک مرکز خرید واقعاً شلوغ هستید. «شما به هیچ کس فراتر از افرادی که در همسایگی شما هستند، مانند ۵ متری اطراف شما، اهمیت نمیدهید، از این نظر که با خیال راحت به اطراف بروید و با کسی برخورد نکنید. کار ما رویکرد محلی مشابهی دارد.
سد ایمنی
در مطالعه جدید خود، این تیم روش خود را، GCBF+، که مخفف "عملکرد مانع کنترل گراف" است، ارائه کردند. تابع مانع یک اصطلاح ریاضی است که در رباتیک استفاده میشود که نوعی مانع ایمنی یا مرزی را محاسبه میکند که فراتر از آن یک عامل احتمال ناامن بودن بالایی دارد. برای هر عامل معین، این منطقه ایمنی میتواند لحظه به لحظه تغییر کند، زیرا عامل در میان سایر عواملی که خود در داخل سیستم در حال حرکت هستند حرکت میکند.
هنگامی که طراحان توابع مانع را برای هر عامل در یک سیستم چند عاملی محاسبه میکنند، معمولاً باید مسیرهای بالقوه و تعاملات با هر عامل دیگر در سیستم را در نظر بگیرند. در عوض، روش تیم MIT، مناطق ایمنی تعداد انگشت شماری از عوامل را محاسبه میکند، به گونهای که به اندازه کافی دقیق است که پویایی بسیاری از عوامل در سیستم را نشان دهد.
سو میگوید: سپس میتوانیم این تابع مانع را برای هر عامل بهنوعی کپی پیست کنیم، و سپس ناگهان نموداری از مناطق ایمنی داریم که برای هر تعداد عامل در سیستم کار میکند.
برای محاسبه تابع مانع یک عامل، روش تیم ابتدا «شعاع حسگر» یک عامل یا مقدار محیط اطراف را که یک عامل میتواند مشاهده کند، بسته به قابلیتهای حسگرش، در نظر میگیرد. درست مانند قیاس مرکز خرید، محققان فرض میکنند که عامل فقط به عواملی اهمیت میدهد که در شعاع حسی خود هستند، از نظر ایمن نگه داشتن و جلوگیری از برخورد با آن عوامل.
سپس، با استفاده از مدلهای رایانهای که تواناییها و محدودیتهای مکانیکی خاص یک عامل را نشان میدهند، تیم یک «کنترلکننده» یا مجموعهای از دستورالعملها را شبیهسازی میکند که چگونه عامل و تعدادی از عوامل مشابه باید در اطراف حرکت کنند. آنها سپس شبیهسازیهایی از چندین عامل را اجرا میکنند که در مسیرهای مشخصی حرکت میکنند، و ثبت میکنند که آیا و چگونه با هم برخورد میکنند یا برهمکنش دارند.
ژانگ میگوید: وقتی این مسیرها را داشتیم، میتوانیم قوانینی را محاسبه کنیم که میخواهیم آنها را به حداقل برسانیم، مثلاً تعداد موارد نقض ایمنی در کنترلکننده فعلی را به حداقل برسانیم». "سپس ما کنترلر را به روز میکنیم تا ایمنتر باشد.
به این ترتیب، یک کنترلر را میتوان در عوامل واقعی برنامه ریزی کرد، که آنها را قادر میسازد تا به طور مستمر منطقه ایمنی خود را بر اساس هر عامل دیگری که میتوانند در محیط اطراف خود احساس کنند، نقشه برداری کنند و سپس در آن منطقه ایمنی حرکت کنند تا وظیفه خود را انجام دهند.
فن میگوید: کنترل کننده ما واکنشی است. ما از قبل یک مسیر را از قبل برنامه ریزی نمیکنیم. کنترلکننده ما دائماً اطلاعاتی در مورد اینکه یک مامور به کجا میرود، سرعت آن چقدر است و سایر پهپادها با چه سرعتی میروند، دریافت میکند. این از همه این اطلاعات برای رسیدن به یک برنامه در پرواز استفاده میکند و هر بار در حال برنامه ریزی مجدد است. بنابراین، اگر وضعیت تغییر کند، همیشه میتواند برای ایمن ماندن خود را وفق دهد.
این تیم GCBF+ را بر روی یک سیستم هشت کرازی فلای نشان دادند - پهپادهای کوادروتور سبک و به اندازه کف دست که وظیفه پرواز و تغییر موقعیت در هوا را بر عهده داشتند. اگر قرار بود پهپادها این کار را با در پیش گرفتن مستقیمترین مسیر انجام دهند، مطمئناً با هم برخورد میکردند. اما پس از آموزش با روش تیم، پهپادها توانستند تنظیماتی را در زمان واقعی برای مانور در اطراف یکدیگر انجام دهند و در مناطق ایمنی مربوطه خود باقی بمانند تا با موفقیت موقعیت خود را در پرواز تغییر دهند.
به روشی مشابه، این تیم به هواپیماهای بدون سرنشین وظیفه پرواز در اطراف، سپس فرود بر روی Turtlebots خاص - روباتهای چرخدار با بالای پوستهمانند را داد. لاک پشتها به طور مداوم در یک دایره بزرگ میچرخیدند و Crazyflies میتوانستند هنگام فرود با یکدیگر از برخورد با یکدیگر جلوگیری کنند.
فن که تصور میکند این روش میتواند به کار گرفته شود، میگوید: با استفاده از چارچوب خود، ما فقط باید به جای کل مسیر بدون برخورد، به هواپیماهای بدون سرنشین مقصدشان را بدهیم، و پهپادها میتوانند بفهمند که چگونه بدون برخورد به مقصد برسند. به هر سیستم چندعاملی برای تضمین ایمنی آن، از جمله سیستمهای جلوگیری از برخورد در نمایشهای هواپیماهای بدون سرنشین، روباتهای انبار، وسایل نقلیه رانندگی خودکار و سیستمهای تحویل پهپاد.
این کار تا حدی توسط بنیاد ملی علوم ایالات متحده، آزمایشگاه MIT لینکلن تحت برنامه ایمنی در رژیمهای پرواز هوازی (SAFR) و آژانس علوم و فناوری دفاعی سنگاپور پشتیبانی شد.
لینک کپی شد
گزارش خطا