ورق رباتیک تغییر شکل دهنده، بدون لولای مکانیکی، میخزد، تا میشود و محکم میگیرد
به گزارش گروه دانشگاه خبرگزاری دانشجو، در یک جهش بزرگ برای رباتیک تطبیقی، محققان موسسه پیشرفته علوم و فناوری کره (KAIST) یک ورق رباتیک قابل برنامهریزی توسعه دادهاند که میتواند شکل خود را تغییر دهد، حرکت دهد و اشیاء را بگیرد، همه اینها بدون لولاهای مکانیکی یا بازسازی خارجی.
این نوآوری میتواند راه را برای رباتهای نسل بعدی که از نظر فیزیکی در زمان واقعی با محیط خود سازگار میشوند، هموار کند.
این تیم به رهبری پروفسور کیم جونگ و پارک این-کیو از دانشکده مهندسی مکانیک KAIST، از چیزی که آن را «ورق تاشو رباتیک قابل برنامهریزی میدانی» مینامند، رونمایی کردند. این کار هوش مصنوعی فیزیکی را با قابلیت برنامهریزی مجدد کنترلشده توسط نرمافزار ترکیب میکند.
این رویکرد، راهحلهایی را برای یک مشکل دیرینه در رباتیک ارائه میدهد - ایجاد سیستمهایی که میتوانند بر اساس وظیفه یا محیط تغییر شکل دهند، بدون اینکه نیاز به بازسازی یا طراحی مجدد هر بار داشته باشند.
تاشو بدون لولاهای ثابت
تبدیل مبتنی بر تا شدن سالهاست که یک استراتژی رایج در رباتیک بوده است. این روش کارآمد، شهودی و الهام گرفته از اوریگامی است. اما سیستمهای سنتی به لولاهای از پیش طراحی شده و مسیرهای تا شدن ثابت متکی هستند که انعطافپذیری و سازگاری آنها را محدود میکند.
تیم KAIST با طراحی یک ورق پلیمری نازک و انعطافپذیر که با شبکهای متراکم از مقاومتهای فلزی جاسازی شده بود، بر این مشکل غلبه کرد.
این مقاومتها هم به عنوان گرمکن و هم به عنوان حسگر عمل میکنند.
وقتی گرم میشود، ماده خم میشود؛ وقتی سرد میشود، به حالت اولیه برمیگردد. این شبکه دوکاره به ورق اجازه میدهد تا بدون نیاز به حسگرها یا محرکهای خارجی، تا بزند، حرکات خود را کنترل و اصلاح کند.
برخلاف سیستمهای قبلی که برای تغییر وظایف نیاز به پیکربندی مجدد فیزیکی داشتند، این صفحه رباتیک به دستورات نرمافزاری پاسخ میدهد.
کاربران میتوانند با استفاده از یک رابط کاربری ساده، شکل، موقعیت تا شدن و جهتها را در حین کار دوباره برنامهریزی کنند.
سپس این صفحه این دستورات را به صورت خودکار اجرا میکند و از بازخورد دمایی در لحظه برای حفظ دقت استفاده میکند.
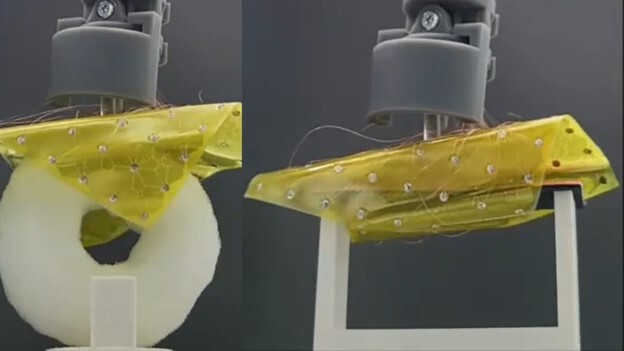
یک نمونه اولیه ۴۰ سانتیمتر مربعی که با ۳۰۸ واحد مقاومتی جاسازی شده بود، پتانسیل این فناوری را نشان داد.
محققان آن را برای راه رفتن، خزیدن و حتی گرفتن اشیاء مانند ظروف پتری و چوبهای چوبی برنامهریزی کردند. این ربات به زاویههای تاشدگی بین -۸۷ درجه و ۱۰۹ درجه دست یافت و در طیف وسیعی از دما از ۳۰ درجه سانتیگراد تا ۱۷۰ درجه سانتیگراد عمل کرد.
سازگاری مبتنی بر هوش مصنوعی
برای افزایش کارایی، این سیستم الگوریتمهای ژنتیک و شبکههای عصبی عمیق را ادغام میکند.
اینها فرآیند تصمیمگیری پشت رفتار تاشدن را تقویت میکنند و پاسخهای تطبیقی به ورودیهای مختلف را ممکن میسازند.
یک سیستم کنترل حلقه بسته با اصلاح تغییرات محیطی، مانند نوسانات دما که معمولاً سیستمهای مبتنی بر گرما را مختل میکنند، خروجی را بیشتر اصلاح میکند.
نتیجه، مادهای است که نه تنها تغییر شکل میدهد، بلکه از طریق شکل خود فکر میکند، چیزی که محققان از آن به عنوان «هوش ریختشناسی» یاد میکنند.
در یک آزمایش، این ورق به عنوان یک گیره عمل کرد که بر اساس شکل جسم، میزان نگهداشتن آن را تنظیم میکرد. در آزمایش دیگر، همان ماده مانند یک موجود زنده بیولوژیکی خزید و حرکت طبیعی را تقلید کرد.
پروفسور کیم گفت: «این تحقیق ما را یک قدم به چیزی که «هوش ریختشناسی» مینامیم، نزدیکتر میکند، جایی که شکل ربات بخشی از هوش آن میشود.»
این تیم قصد دارد ظرفیت تحمل بار ورق را بهبود بخشد، زمان خنک شدن را تسریع کند و الکترودهای یکپارچهای را بدون سیمکشی خارجی توسعه دهد.
در درازمدت، آنها قصد دارند این را به یک پلتفرم هوش مصنوعی قابل استقرار برای واکنش به بلایای طبیعی، دستگاههای پزشکی شخصیسازیشده و حتی اکتشافات فضایی تبدیل کنند.
بنیاد ملی تحقیقات کره، تحت نظر وزارت علوم و فناوری اطلاعات و ارتباطات، از این تحقیق حمایت مالی کرد.
این مطالعه در مجله Nature Communications منتشر شده است.